This website was created and is maintained by Rob Englebright, illustrator,
robot builder,father and polymath
Killer Carrot 2, Big Orange and Dangerous!
This website was created and is maintained by Rob Englebright, illustrator,
robot builder,father and polymath

Urrgh! don't pick your nose or you could end up like this!
The full lowdown of Team "Dangerous Vegetables"

Glub, glub, it's Keeler Carrot. The world's only giant 5ft swimming carrot.

Diced Carrot 2. 150g's of antweight terror, sculpted in aluminium, with a fearsome flip.

Killer Carrot 2, the TV star of "Robot's Revenge". 100kg's of steel and lexan

Killer Carrot 1, original and best. 50kg's of lurid orange fighting machine.
| Created and maintained since September 2000 by Rob Englebright |

|
20-5-02 Rebuild for the Wars |
|||||||||||||
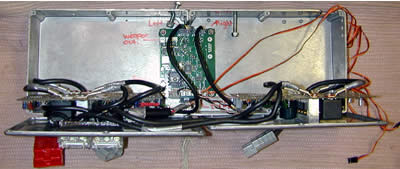
Once the board was mounted,the whole system takes about 15-20 minutes to setup, has reassuring led's letting you know what's going on. The performance difference is quite marked, previously there was a small but noticeable lag, from the servo twisting the pot to action and speed control response. Now the response is instant, giving a very precise and accurate control. I ran the first real test at at evening "demonstration" to the local church youth group, and it went very well. With the
controls sorted I decided I really should get ready for Robot Wars.
Rumour has it the qualifiers are in the first week of July, which gives
me just short of 6 weeks to get up to speed. |
|||||||||||||
| Archived diary items | |||||||||||||
| Ancient History | 4-1-01 | 15-5-02 | |||||||||||
| 22-9-00 | 12-2-01 | ||||||||||||
| 26-10-00 | 26-7-01 | ||||||||||||
| 28-10-00 | 22-9-01 | ||||||||||||
| next archive | |||||||||||||